

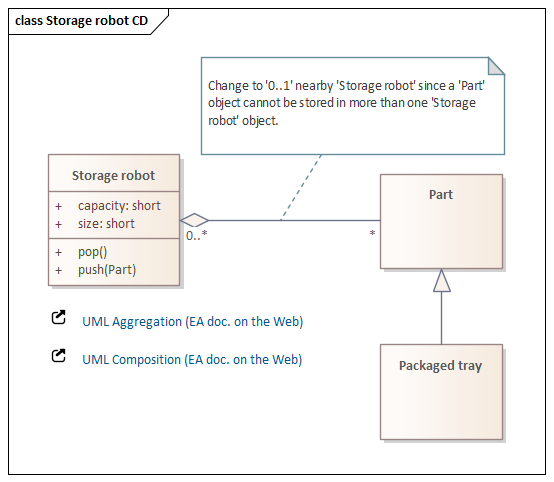
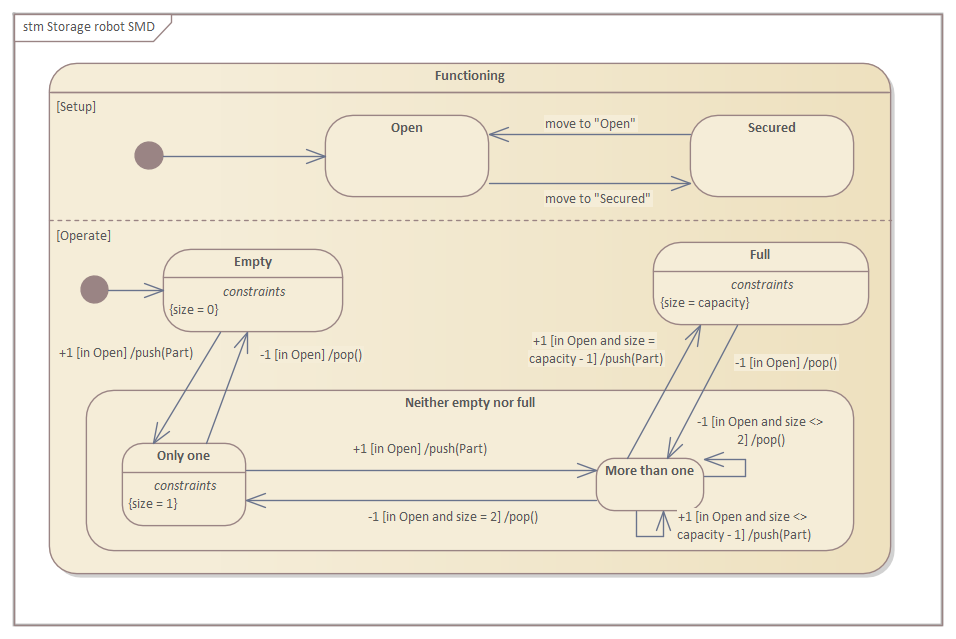
Un robot de stockage (Storage robot) de capacité maximale
capacitystocke un certain nombre (size) de pièces (Part) selon un fonctionnement Last-In, First-Out. Il peut être vide, ni vide-ni plein ou plein. Ni vide-ni plein se décompose en, respectivement, une et une pièce empilée ou plus d'une (sans que ce soit plein). On peut empiler (push) une pièce si non plein ou désempiler (pop) la dernière pièce si non vide.En mode « ouvert », les consignes
+1et-1peuvent être envoyées avec effet sur le robot de stockage. En mode « sécurisé », ces consignes envoyées n'ont pas d'effet. La bascule entre les deux modes s'opère par les événements « passer en sécurisé » et « passer en ouvert ».
Exercise
- UML State Machine Diagram
Note: a replication-based project cannot be shared on a server (server-based sharing)
Key action(s)
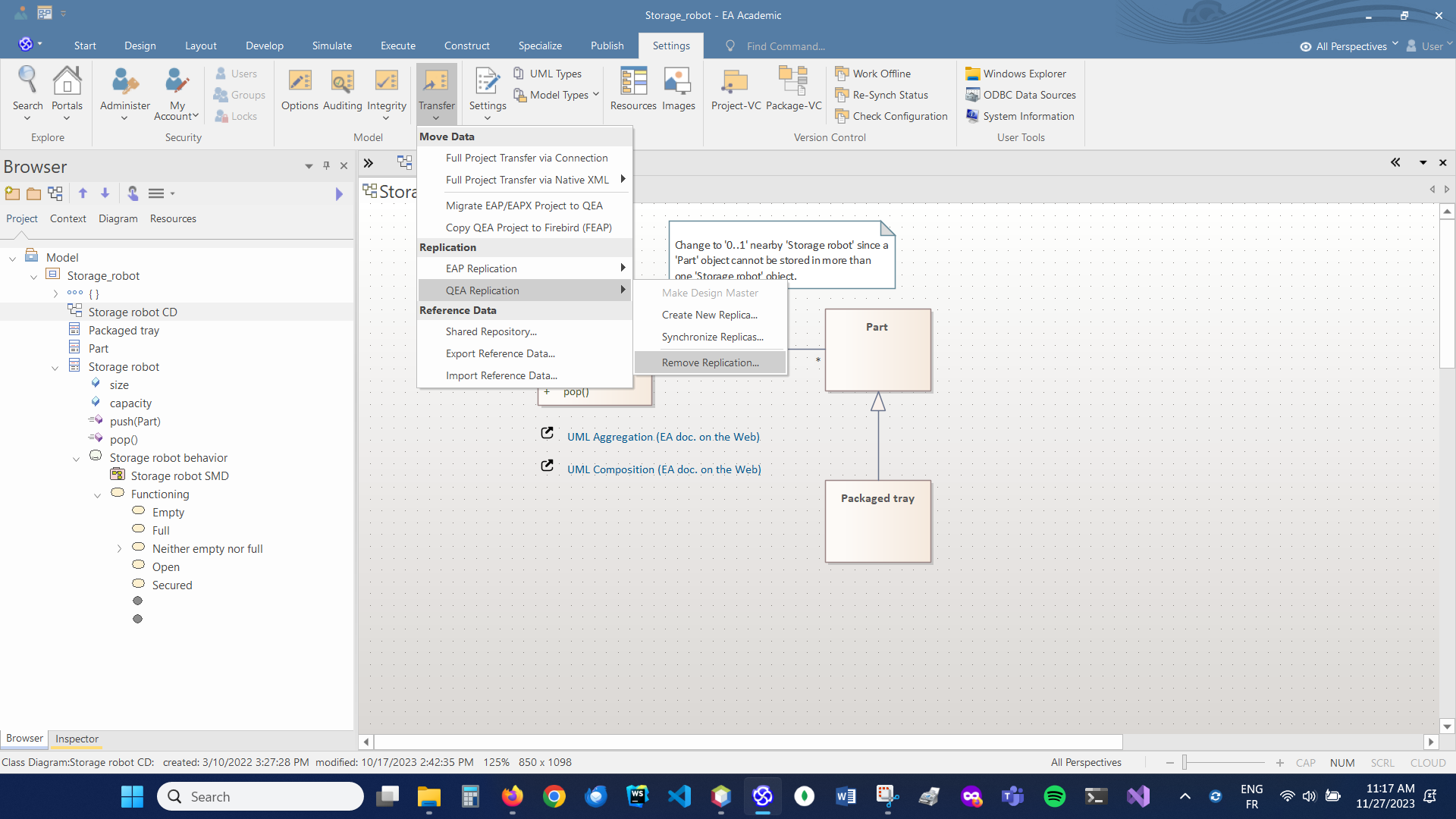
Settings⇝Transfer -Model-⇝QEA Replication -Replication-⇝Make Design MasterSettings⇝Transfer -Model-⇝QEA Replication -Replication-⇝Create New Replica…Settings⇝Transfer -Model-⇝QEA Replication -Replication-⇝Synchronize Replicas…- Conflict resolution ☛
Replication-based sharing
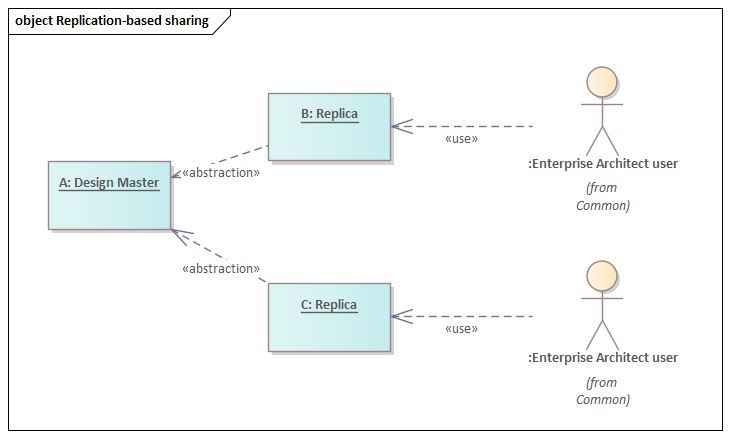
Replication ⤳ remove replication (if any)
Replication ⤳ design master
Replication ⤳
Breplica (Packaged trayremoved…)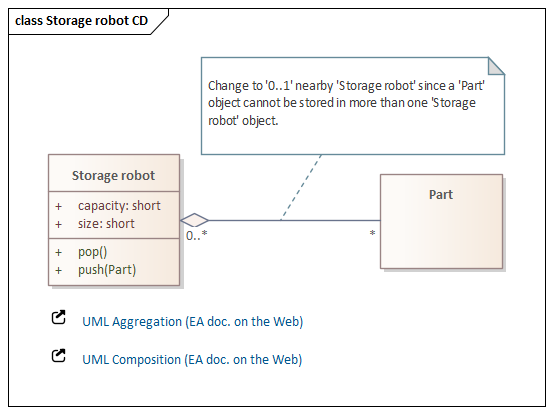
Replication ⤳
Creplica (note removed… while cardinality moves to0..1)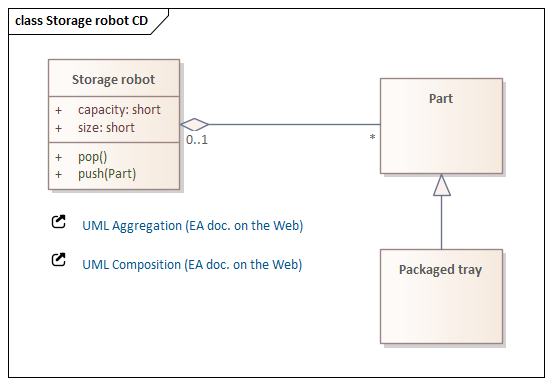
Replication ⤳ synchronization: design master +
B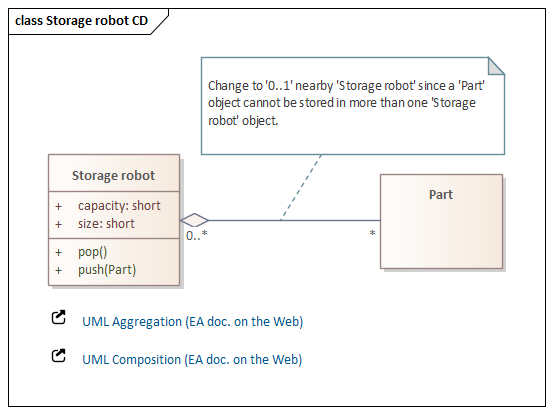
Replication ⤳ synchronization: design master +
B+C(deletions prevail over modifications ⤳ no conflict)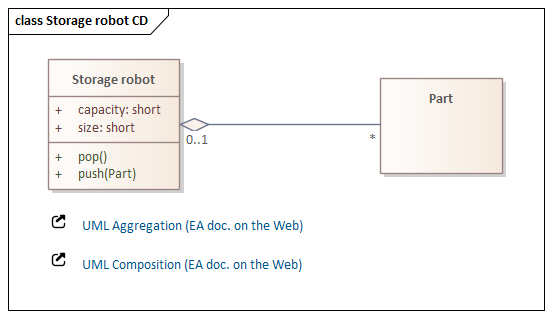
Exercise
- Create
Dreplica and changecapacityattribute tointtype- Create
Ereplica, changecapacityattribute tolongtype- Synchronize
Dand nextEReplication ⤳ synchronization: conflict from exercise
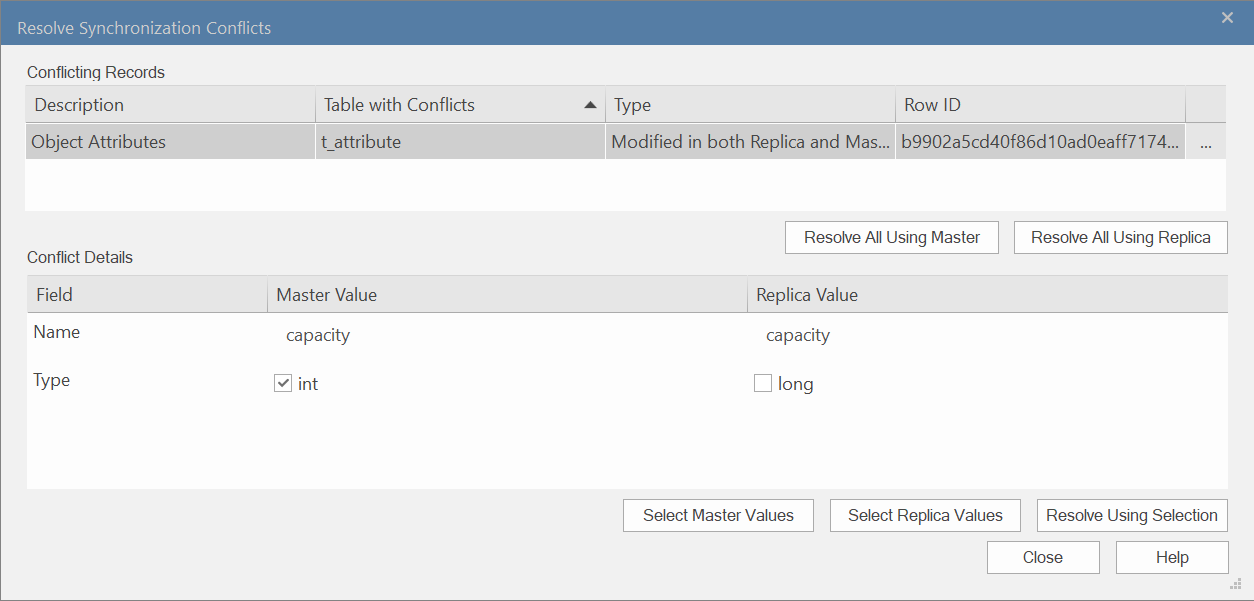
Issues
Select Master Values(i.e.,int) does not propagate change to replicaEResolve Using Selection(choice beingMaster Value, i.e.,int) does propagate change to replicaE